LiDAR (Light Detection And Ranging) là một loại cảm biến đo khoảng cách bằng tia laser. Nó phát ra ánh sáng laser, đo thời gian ánh sáng phản xạ quay trở lại, từ đó tính được khoảng cách tới vật thể.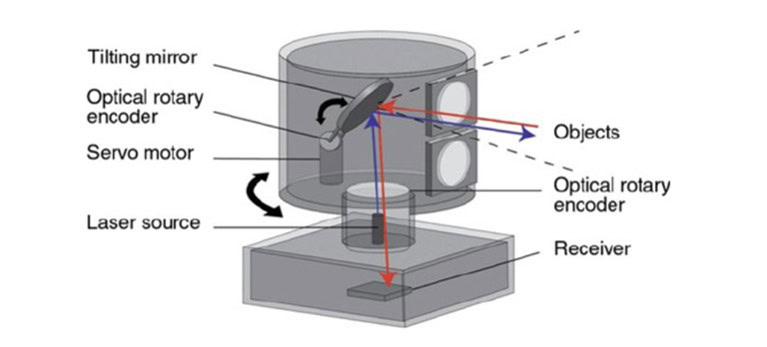
Nguyên lý rất giống radar, nhưng:
- Radar → dùng sóng radio
- LiDAR → dùng ánh sáng laser
1. Nguyên lý hoạt động
Ví dụ:
LiDAR
|
|-----> tia laser
|
| Vật cản
| █
| █
|
<----- ánh sáng phản xạ
Cảm biến đo:
Thời gian đi + về của tia laser
sau đó tính:
Khoảng cách = tốc độ ánh sáng × thời gian / 2
2. LiDAR khác HC-SR04 thế nào?
Bạn đang dùng HC-SR04 cho xe Follow Me, nên so sánh như sau:
| HC-SR04 | LiDAR | |
|---|---|---|
| Công nghệ | Siêu âm | Laser |
| Khoảng cách | ~2cm-4m | vài cm đến hàng chục mét |
| Độ chính xác | trung bình | cao hơn |
| Tốc độ | chậm hơn | nhanh |
| Bị ảnh hưởng | gió, góc vật | ít hơn |
| Nhận dạng hình dạng | kém | tốt hơn |
3. Các loại LiDAR thường dùng cho robot
Loại nhỏ (đo 1 điểm)
Ví dụ:
VL53L0X Time-of-Flight sensor
Dùng cho:
- tránh vật cản
- đo khoảng cách trước xe
Kết nối:
ESP32
|
I2C
|
VL53L0X
Rất phù hợp cho robot nhỏ.
Loại quét 360 độ
Ví dụ:
RPLIDAR A1
Đây là loại hay thấy trên robot tự hành.
Nó quay liên tục:
*
* *
* ↑ *
* | *
* LiDAR *
* *
*
Nó tạo bản đồ xung quanh:
tường
|
* * * * *
* *
* robot *
* *
* * * * *
Dùng cho:
- robot hút bụi
- xe tự hành
- robot giao hàng
4. Trong xe Follow Me của bạn LiDAR dùng để làm gì?
Với hệ:
ESP32
+
BLE RSSI
+
HC-SR04
+
L298N
+
2 motor
hiện tại:
- BLE RSSI → biết người gần hay xa
- HC-SR04 → tránh đâm
Nếu nâng cấp:
ESP32
+
LiDAR
+
BLE
+
Motor
LiDAR có thể:
- phát hiện vật cản chính xác hơn
- biết tường, bàn ghế
- xây bản đồ
- đi trong nhà thông minh hơn
Ví dụ:
Người đi trước:
Người
↑
|
LiDAR
|
Xe
BLE nói:
“người đang ở phía trước”
LiDAR nói:
“phía trước có vật cách 1.5m”
→ xe điều chỉnh hướng.
5. Nhưng ESP32 có dùng được LiDAR không?
Có.
Ví dụ:
- VL53L0X → rất dễ với ESP32
- RPLIDAR → ESP32 có thể giao tiếp UART nhưng xử lý bản đồ phức tạp thì thường dùng thêm Raspberry Pi
Một hệ mạnh hơn:
ESP32
|
điều khiển motor
Raspberry Pi
|
LiDAR + AI + bản đồ
Với dự án xe Follow Me mà bạn đang làm, nếu nâng cấp theo từng bước tôi sẽ đi theo thứ tự:
- ESP32 + BLE RSSI + 3 HC-SR04 ✅ (bạn đang làm)
- Thêm encoder motor để đo quãng đường
- Thêm IMU (MPU6050)
- Thêm LiDAR
- Thêm camera AI
Đó là hướng đi gần với robot tự hành thực tế.