Robot đi theo người dùng Arduino | Robot Arduino tốt nhất
Chào các bạn đam mê công nghệ, hôm nay chúng ta sẽ thực hiện một dự án rất thú vị và đang thịnh hành, đó là robot theo dõi người . Một robot có thể đi theo một chú chó con giống người. Trong dự án này, bạn sẽ học được rất nhiều điều như giao diện siêu âm Arduino, làm việc với mạch điều khiển động cơ Arduino, và nhiều hơn nữa.
Vì vậy, chúng tôi sẽ chia sẻ tất cả dữ liệu để biến điều đó thành hiện thực. Robot Arduino rất dễ chế tạo và rất thú vị. Đây cũng là một robot dựa trên Arduino. Chúng tôi đã chế tạo rất nhiều robot Arduino như robot tránh chướng ngại vật và robot dò đường.
Hôm nay, chúng ta sẽ cùng nhau chế tạo một robot biết đi theo người trong loạt bài về robot Arduino . Để thực hiện dự án này, hãy làm theo tất cả các hướng dẫn mà chúng tôi sẽ chia sẻ ở đây.
Mục lục
Con người theo dõi robot là gì? | Robot Arduino
Sau khi nghe tên, mọi người đều thắc mắc Robot là gì? Và ý nghĩa của cái tên này là gì? Liệu nó có thực sự đi theo con người không? Không, về cơ bản đây là một robot có khả năng đi theo bất cứ thứ gì.
Robot Arduino này có cảm biến có thể phát hiện bất kỳ vật thể nào ở gần và có thể bám theo vật thể đó. Nếu bạn đến trước mặt robot, nó sẽ bắt đầu bám theo bạn. Robot này bao gồm cảm biến siêu âm và cảm biến hồng ngoại giúp bám theo vật thể. Nó tương tự như robot tránh chướng ngại vật nhưng hoạt động ngược lại. Robot bám theo người là dự án tốt nhất hiện nay. Bạn có thể tạo ra robot tuyệt vời này với các linh kiện được cung cấp.

Nó hoạt động như thế nào?
Để hiểu rõ hơn về cách hoạt động của robot theo dõi người tuyệt vời này, hãy đọc đoạn văn sau.
Khi bạn đến gần, robot sẽ bắt đầu đi theo bạn. Robot có 4 bánh xe và 4 động cơ gắn vào khung gầm. Trên robot có ba cảm biến, một cảm biến siêu âm và hai cảm biến hồng ngoại được bố trí đối xứng hai bên cảm biến siêu âm. Khi bạn đưa tay đến gần cảm biến siêu âm, robot sẽ bắt đầu di chuyển về phía trước.
Nếu bạn xoay tay sang bên trái, robot Arduino sẽ di chuyển sang bên trái, và nếu bạn xoay tay sang bên phải, robot sẽ di chuyển sang bên phải. Vậy, chúng ta sẽ cùng tìm hiểu cách thức hoạt động của toàn bộ hệ thống này.
Khi bạn đưa tay lại gần cảm biến siêu âm, cảm biến sẽ phát hiện bạn và gửi thông tin này đến Arduino. Arduino có một hệ số khoảng cách nhất định, vì vậy nếu tay bạn ở xa cảm biến, nó sẽ không nhận tín hiệu. Và nếu tay bạn ở gần cảm biến, nó sẽ nhận tín hiệu.
Lúc này Arduino biết có vật thể ở phía trước cảm biến và Arduino sẽ gửiMột số lệnh được gửi đến bộ điều khiển động cơ và bộ điều khiển động cơ sẽ kích hoạt các động cơ. Và robot Arduino bắt đầu di chuyển về phía trước, chúng ta cần cho tất cả các động cơ chạy về phía trước.
Giờ thì nói về các cảm biến. Cảm biến hồng ngoại hoạt động dựa trên ánh sáng hồng ngoại, có thể phát hiện vật thể ở gần nó. Vì vậy, có hai cảm biến hồng ngoại, một ở bên trái và một ở bên phải của cảm biến siêu âm. Khi có bất kỳ vật thể nào đến gần cảm biến bên trái, Arduino sẽ nhận được thông tin rằng có vật thể ở gần cảm biến bên trái và theo mã lệnh, robot sẽ quay sang trái. Quá trình tương tự cũng diễn ra với cảm biến bên phải. Đó là cách robot theo dõi người hoạt động.
Dưới đây là tất cả các bước thực hiện và bạn có thể tham khảo video hướng dẫn để hoàn thành dự án tuyệt vời này .
Để thương mại hóa sản phẩm , cuối cùng tôi đã chọn AiPCBA để hoàn thiện dịch vụ lắp ráp PCB .

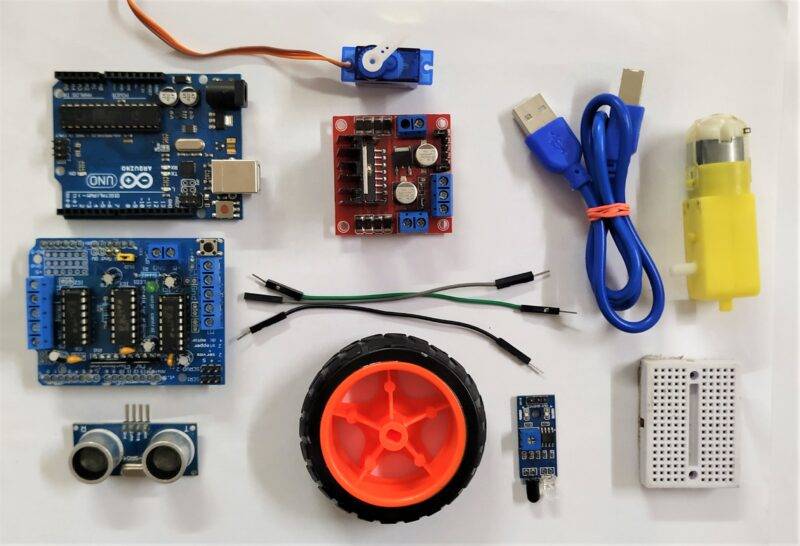
Các thành phần cần thiết:
| Arduino UNO | LIÊN KẾT MUA HÀNG |
| Mạch điều khiển động cơ Arduino | LIÊN KẾT MUA HÀNG |
| Dây nối | LIÊN KẾT MUA HÀNG |
| 4 động cơ BO | LIÊN KẾT MUA HÀNG |
| Pin 9V | LIÊN KẾT MUA HÀNG |
| 4 bánh | LIÊN KẾT MUA HÀNG |
| Khung gầm | LIÊN KẾT MUA HÀNG |
| Cảm biến siêu âm | LIÊN KẾT MUA HÀNG |
| 2 cảm biến hồng ngoại | LIÊN KẾT MUA HÀNG |
| công tắc bật/tắt | LIÊN KẾT MUA HÀNG |
| động cơ servo | LIÊN KẾT MUA HÀNG |
Bạn có thể mua tất cả các linh kiện cùng lúc – LIÊN KẾT MUA HÀNG
Chúng ta cũng cần sơ đồ mạch điện.
https://www.youtube.com/watch?v=lcr9i9rrIPs
Sơ đồ mạch điện mô phỏng người đi theo robot.

| Arduino UNO | Cảm biến siêu âm 1 | ||||
| ( +5V ) | VCC | ||||
| GND | GND | ||||
| Ghim A1 | Chốt Trig | ||||
| Ghim A0 | Ghim Echo | ||||
| Arduino UNO | Động cơ servo | ||||
| Chân D10 | Chốt ra (Màu cam) | ||||
| ( +5V ) | VCC (Màu đỏ) | ||||
| GND | GND (Màu đen) | ||||
| Arduino UNO | Cảm biến hồng ngoại 1 | Cảm biến hồng ngoại 2 | |||
| Chân A2 | Ghim ngoài | ||||
| Ghim A3 | Ghim ngoài | ||||
| ( +5V ) | VCC | VCC | |||
| GND | GND | GND | |||
| Mạch điều khiển động cơ Arduino | Công tắc | Nguồn điện 9-12 volt | |||
| Nhà ga số 1 | VCC | ||||
| Quyền lực | Nhà ga số 2 | ||||
| GND | GND | ||||
| Mạch điều khiển động cơ Arduino | Động cơ 1 | Động cơ 2 | Động cơ 3 | Động cơ 4 | |
| M 1 | MỘT | Nhà ga số 1 | |||
| B | Nhà ga số 2 | ||||
| M 2 | MỘT | Nhà ga số 1 | |||
| B | Nhà ga số 2 | ||||
| M 3 | MỘT | Nhà ga số 1 | |||
| B | Nhà ga số 2 | ||||
| M 4 | MỘT | Nhà ga số 1 | |||
| B | Nhà ga số 2 |
Con người đi theo Robot (mã lập trình robot Arduino)
//Arduino Human Following Robot
// You have to Install the AFMotor and NewPing library Before Uploading the sketch//
// To install the libraries ( first download the AF Motor driver, NewPing and Servo Library zip file //
// then Go to Skecth >> Include Library >> Add .Zip Library >> Select The downloaded zip file >> Done) //
// Contact me on instagram for any question(Insta Id : DIY.Builder)
#include<NewPing.h>
#include<Servo.h>
#include<AFMotor.h>
#define RIGHT A2
#define LEFT A3
#define TRIGGER_PIN A1
#define ECHO_PIN A0
#define MAX_DISTANCE 100
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
AF_DCMotor Motor1(1,MOTOR12_1KHZ);
AF_DCMotor Motor2(2,MOTOR12_1KHZ);
AF_DCMotor Motor3(3,MOTOR34_1KHZ);
AF_DCMotor Motor4(4,MOTOR34_1KHZ);
Servo myservo;
int pos =0;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
myservo.attach(10);
{
for(pos = 90; pos <= 180; pos += 1){
myservo.write(pos);
delay(15);
} for(pos = 180; pos >= 0; pos-= 1) {
myservo.write(pos);
delay(15);
}for(pos = 0; pos<=90; pos += 1) {
myservo.write(pos);
delay(15);
}
}
pinMode(RIGHT, INPUT);
pinMode(LEFT, INPUT);
}
void loop() {
// put your main code here, to run repeatedly:
delay(50);
unsigned int distance = sonar.ping_cm();
Serial.print("distance");
Serial.println(distance);
int Right_Value = digitalRead(RIGHT);
int Left_Value = digitalRead(LEFT);
Serial.print("RIGHT");
Serial.println(Right_Value);
Serial.print("LEFT");
Serial.println(Left_Value);
if((Right_Value==1) && (distance>=10 && distance<=30)&&(Left_Value==1)){
Motor1.setSpeed(120);
Motor1.run(FORWARD);
Motor2.setSpeed(120);
Motor2.run(FORWARD);
Motor3.setSpeed(120);
Motor3.run(FORWARD);
Motor4.setSpeed(120);
Motor4.run(FORWARD);
}else if((Right_Value==0) && (Left_Value==1)) {
Motor1.setSpeed(200);
Motor1.run(FORWARD);
Motor2.setSpeed(200);
Motor2.run(FORWARD);
Motor3.setSpeed(100);
Motor3.run(BACKWARD);
Motor4.setSpeed(100);
Motor4.run(BACKWARD);
}else if((Right_Value==1)&&(Left_Value==0)) {
Motor1.setSpeed(100);
Motor1.run(BACKWARD);
Motor2.setSpeed(100);
Motor2.run(BACKWARD);
Motor3.setSpeed(200);
Motor3.run(FORWARD);
Motor4.setSpeed(200);
Motor4.run(FORWARD);
}else if((Right_Value==1)&&(Left_Value==1)) {
Motor1.setSpeed(0);
Motor1.run(RELEASE);
Motor2.setSpeed(0);
Motor2.run(RELEASE);
Motor3.setSpeed(0);
Motor3.run(RELEASE);
Motor4.setSpeed(0);
Motor4.run(RELEASE);
}else if(distance > 1 && distance < 10) {
Motor1.setSpeed(0);
Motor1.run(RELEASE);
Motor2.setSpeed(0);
Motor2.run(RELEASE);
Motor3.setSpeed(0);
Motor3.run(RELEASE);
Motor4.setSpeed(0);
Motor4.run(RELEASE);
}
}
Trong quá trình tải lên mã, bạn có thể gặp lỗi.
Vì vậy, bạn cần cài đặt một số thư viện.
Robot tránh chướng ngại vật sử dụng Arduino
Hướng dẫn lập trình robot dò đường bằng Arduino
Robot tránh chướng ngại vật sử dụng Arduino – Hai cảm biến
Cách chế tạo robot tự cân bằng
Robot điều khiển từ xa sử dụng Arduino và mô-đun cảm biến TSOP
Chúc mọi điều tốt đẹp nhất nhé các bạn.